- Artificial Neural Networks: An Introduction
- Artificial Neural Networks: Problems with Multiple Hidden Layers
- Artificial Neural Networks: Introduction to Deep Learning
- Artificial Neural Networks: Restricted Boltzmann Machines
- Artificial Neural Networks: Training for Deep Learning – I
- Artificial Neural Networks: Training for Deep Learning – IIa
This post, like the series provides a pathway into deep learning by introducing some of the concepts using some common reference points. This is not designed to be an exhaustive research review of deep learning techniques. I have also tried to keep the description neutral of any programming language, though the backing code is written in Java.
So far we have visited shallow neural networks and their building blocks (post 1), investigated their performance on difficult problems and explored their limitations (post 2). Then we jumped into the world of deep networks and described the concept behind them (post 3) and the RBM building block (post 4). Then we started discussing a possible local (greedy) training method for such deep networks (post 5). In the previous post we started talking about the global training and also about the two possible ‘modes’ of operation (discriminative and generative).
In the previous post the difference between the two modes was made clear. Now we can talk a bit more about how the global training works.
As you might have guessed the two operating modes need two different approaches to global training. The differences in flow for the two modes and the required outputs also means there will be structural differences when in the two modes as well.
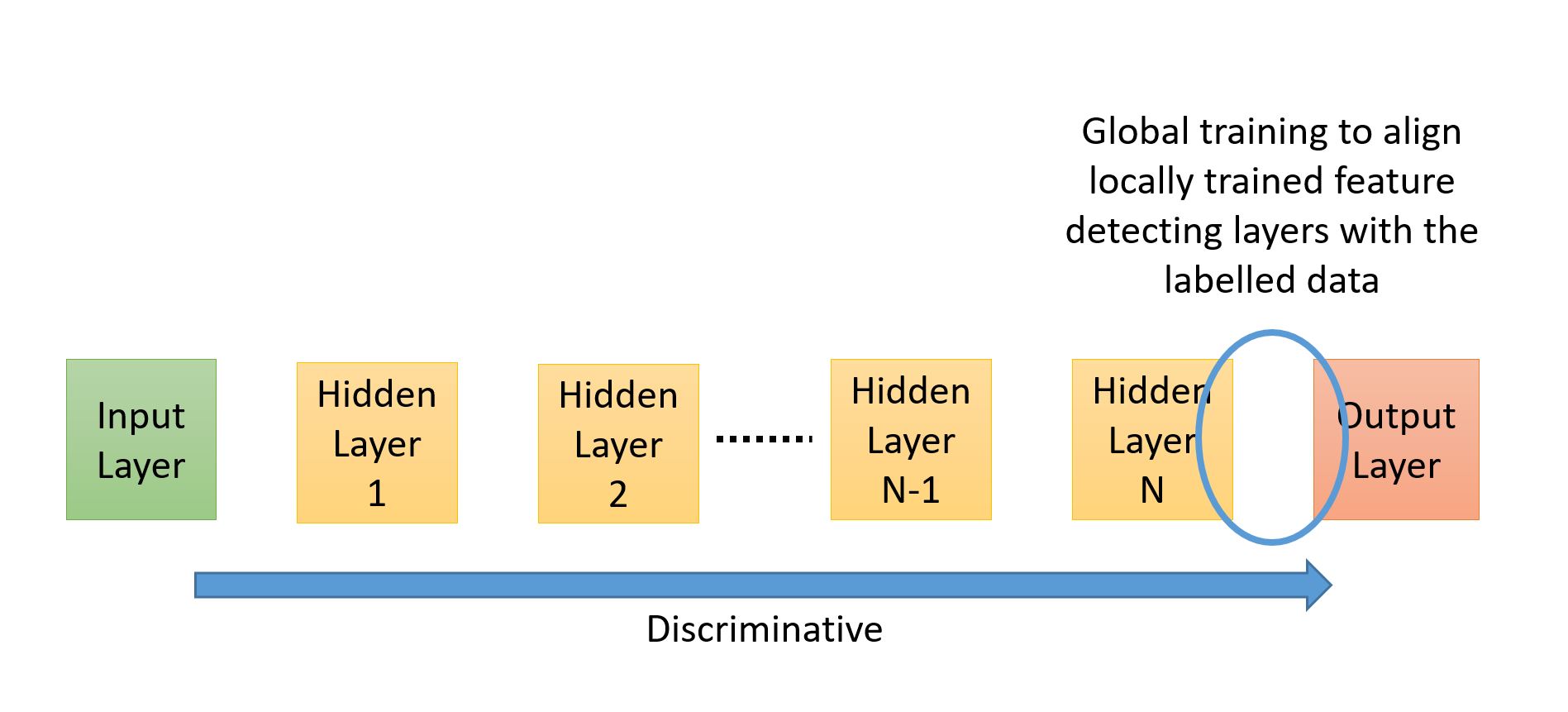
The image below shows a standard discriminative network where flow of propagation is from input to the output layer. In such networks the standard back-propagation algorithm can be used to do the learning closer to the output layers. More about this in a bit.
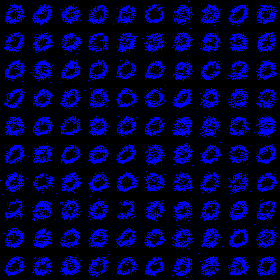
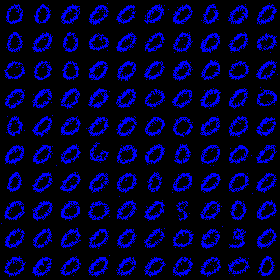
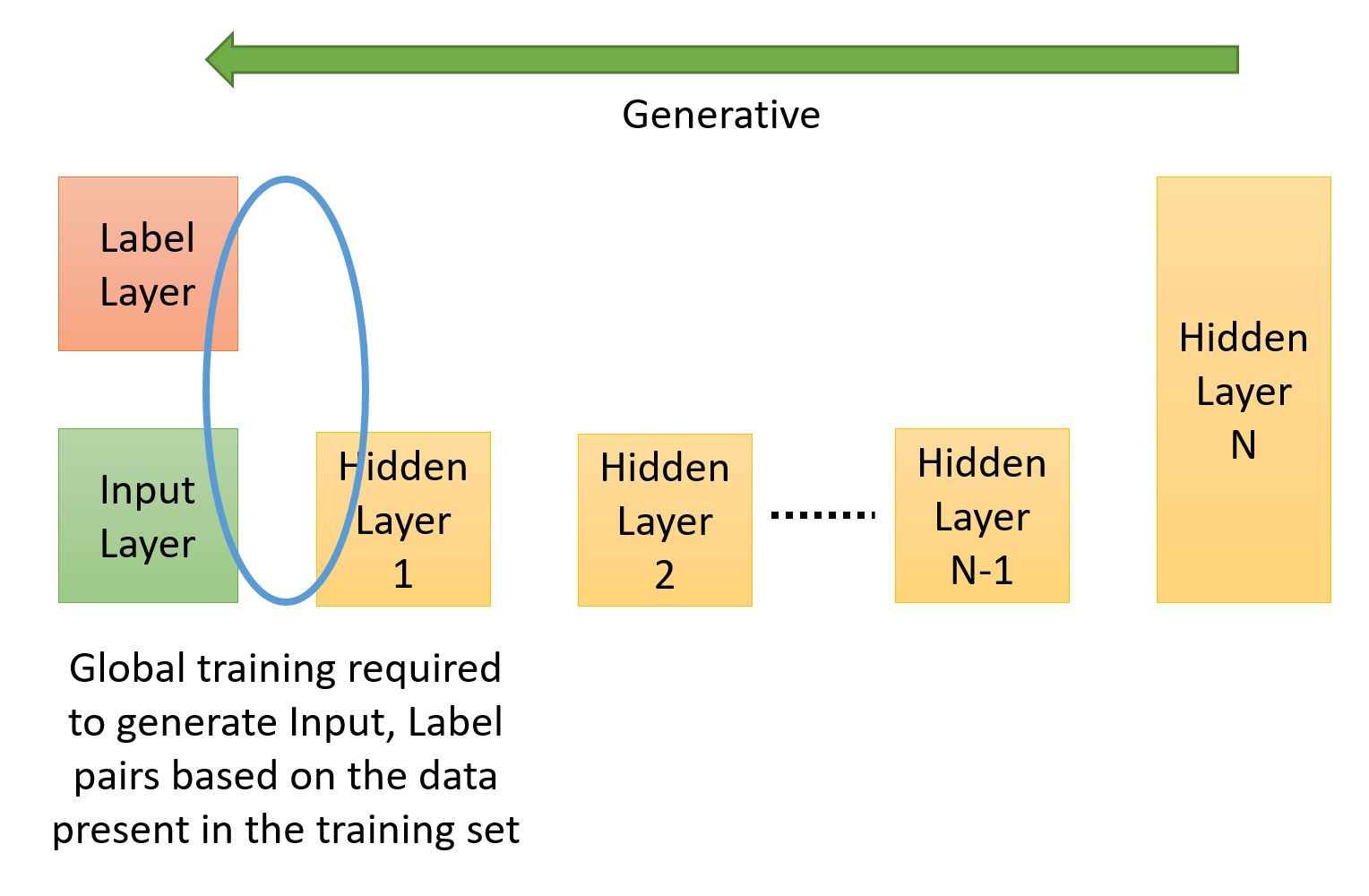
The image below shows a generative network where the flow is from the hidden layers to the visible layers. The target is to generate an input, label pair. This network needs to learn to associate the labels with inputs. The final hidden layer is usually lot larger as it needs to learn the joint probability of the label and input. One of the algorithms used for global training of such networks is called the ‘wake-sleep’ algorithm. We will briefly discuss this next.
Wake-Sleep Algorithm:
The basic idea behind the wake-sleep algorithm is that we have two sets of weights between each layer – one to propagate in the Input => Hidden direction (so called discriminative weights) and the other to propagate in the reverse direction (Hidden => Input – so called generative weights). The propagation and training are always in opposite directions.
The central assumption behind wake-sleep is that hidden units are independent of each other – which holds true for Restricted Boltzmann Machines as there are no intra-layer connections between hidden units.
Then the algorithm proceeds in two phases:
- Wake Phase: Drive the system using input data from the training set and the discriminative weights (Input => Hidden). We learn (tune) the generative weights (Hidden => Input) – thus we are trying to learn how to recreate the inputs by tuning the generative weights
- Sleep Phase: Drive the system using a random data vector at the top most hidden layer and the generative weights (Hidden => Input). We learn (tune) the discriminative weights (Input => Hidden) – thus we are trying to learn how to recreate the hidden states by tuning the discriminative weights
As our primary target is to understand how deep learning networks can be used to classify data we are not going to get into details of wake-sleep.
There are some excellent papers for Wake-Sleep by Hinton et. al. that you can read to further your knowledge. I would suggest you start with this one and the references contained in it.
Back-propagation:
You might be wondering why we are talking about back-prop (BP) again when we listed all those ‘problems’ with it and ‘deep networks’. Won’t we be affected by issues such as ‘vanishing gradients’ and being trapped in sub-optimal local minima?
The trick here is that we do the pre-training before BP which ensures that we are tuning all the layers (in a local – greedy way) and giving BP a head start by not using randomly initialised weights. Once we start BP we don’t care if the layers closer to the input layer do not change their weights that much because we have already ‘pointed’ them in a sensible direction.
What we do care about is that the features closer to the output layer get associated with the right label and we know BP for those outer layers will work.
The issue of sub-optimal local minima is addressed by the pre-training and the stochastic nature of the networks. This means that there is no hard convergence early on and the network can ‘jump’ its way out of a sub-optimal local minima (with decreasing probability though as the training proceeds).
Classification Example – MNIST:
The easiest way to go about this is to use ‘shallow’ back propagation where we put a layer of logistic units on top of the existing deep network of hidden units (i.e. the Output Layer in the discriminative arrangement) and only this top layer is trained. The number of logistic units is equal to the number of classes we have in the classification task if using one-hot encoding to encode the classes.
An example is provided on my github, the test file is: rd.neuron.neuron.test.TestRBMMNISTRecipeClassifier
This may not give record breaking accuracy but it is a good way of testing discriminative deep networks. It also takes less time to train as we are splitting the training into two stages and always ever training one layer at a time:
- Greedy training of the hidden layers
- Back-prop training of the output layer
The other advantage this arrangement has is that it is easy to reason about. In stage 1 we train the feature extractors and in stage 2 we train the feature – class associations.
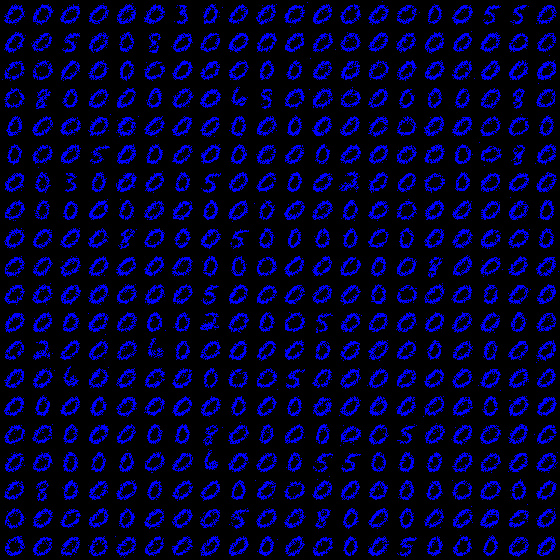
One example network for MNIST is:
Input Image > 784 > 484 > 484 > 484 > 10 > Output Class
This has 3 RBM based Hidden Layers with 484 neurons per layer and a 10 unit wide Logistic Output Layer (we can also use a SoftMax layer). The Hidden Layers are trained using CD10 and the Output Layer is trained using back propagation.
To evaluate we do peak matching – the index of the highest value at the output layer must match the one-hot encoded label index. So if the label vector is [0, 0, 0, 1, 0, 0, 0, 0, 0, 0] then the index value for the peak is 3 (we use index starting at 0). If in the output layer the 4th neuron has the highest activation value out of the 10 then we can say it detected the right digit.
Using such a method we can easily get an accuracy of upwards of 95%. While this is not a phenomenal result (the state of the art full network back-prop gives > 99% accuracy for MNIST), it does prove the concept of a discriminative deep network.
The trained model that results is: network.discrm.25.nw and can be found on my github here. The model is simply a list of network layers (LayerIf).
The model can be loaded using:
[codesyntax lang=”java5″]
List<LayerIf> network = StochasticNetwork.load(fileName);
[/codesyntax]
You can use the Propagate class to use it to ‘predict’ the label.
The PatternBuilder class can be used to measure the performance in two ways:
- Match Score: Matches the peak index of the one-hot encoded label vector from the test data with the generated label vector. It is a successful match (100%) is the peaks in the two vectors have the same indexes. This does not tell us much about the ‘quality’ of the assigned label because our ‘peak’ value could just be slightly bigger than other values (more of a speed breaker on the road than a peak!) as long as it is strictly the ‘largest’ value. For example this would be a successful match:
- Test Data Label: [0, 0, 1, 0] => Actual Label: [0.10, 0.09, 0.11, 0.10] as the peak indexes are the same ( = 2 for zero indexed vector)
- and this would be an unsuccessful one: Test Data Label: [0, 0, 1, 0] => Actual Label: [0.10, 0.09, 0.10, 0.11] as the peak indexes are not the same
- Score: Also includes the quality aspect by measuring how close the Test Data and Actual Label values are to each other. This measure of closeness is controlled by a threshold which can be set by the user and incorporates ALL the values in the vector. For example if the threshold is set to 0.1 then:
- Test Data Label: [0, 0, 1, 0] => Actual Label: [0.09, 0.09, 0.12, 0.11] the score will be 2 out of 4 (or 50%) as the last index is not within the threshold of 0.1 as | 0 – 0.11 | = 0.11 which is > 0.1 and same with | 1 – 0.12 | = 0.88 which is > 0.1 thus we score them both a 0. All other values are within the threshold so we score +1 for them. In this case the Match Score would have given a score of 100%.
Next Steps:
So far we have just taken a short stroll at the edge of the Deep Learning forest. We have not really looked at different types of deep learning configurations (such as convolution networks, recurrent networks and hybrid networks) nor have we looked at other computational models of the brain (such as integrate and fire models).
One more thing that we have not discussed so far is how can we incorporate the independent nature of neurons. If you think about it, the neurons in our brains are not arranged neatly in layers with a repeating pattern of inter-layer connections. Neither are they synchronized like in our ANN examples where all the neurons in a layer were guaranteed to process input and decide their output state at the SAME time. What if we were to add a time element to this? What would happen if certain neurons changed state even as we are examining the output? In other words what would happen if the network state also became a function of time (along with the inputs, weights and biases)?
In my future posts I will move to a proper framework (most probably DL4J – deep learning for java or TensorFlow) and show how different types of networks work. I can spend time and implement each type of network but with a host of high quality deep learning libraries available, I believe one should not try and ‘reinvent the wheel’.
If you have found these blog posts useful or have found any mistakes please do comment! My human neural network (i.e. the brain!) is always being trained!